













For this project the goal was to survey the land and develop a bare surface model at a higher resolution than was currently available. The mapping area was defined using property lines provided by the client’s survey team. As you can see Some of the terrain was covered with trees ranging up to 30 meters tall. Most of the terrain, however, was covered with vegetation between 0.3 meters to 1 meter tall.


Terrain in the northern most area were developed by a third party and this area consisted of small dirt or paved roads, small buildings, and low grass fields scattered throughout.Overall, the area was a rectangular plot, approximately 1800 meters x 1600 meters in size. Because of the large area, the mountainous terrain, and a few water hazards, four separate launch sites were employed to cover the terrain safely and to maintain a visual line of sight. To cover this site flight operations were ran for 12 hours spread out over two days, making this operation much faster than convention terrestrial survey methods.





The DJI Matrice 600 Pro remotely piloted aircraft system (RPAS) was used for this operation. Its main specifications with the lidarpod payload are 17 minute endurance, 13 Kg take off wieght, 65 kilometers per hour max speed with a wingspan of 1.67 meters. Operation range is dependant on visual line of sight (VLOS), for this project 800 meters was easily with VLOS.


After the flights, the navigation trajectory data was post-processed using Kinematica. Kinematica is used to take the trajectory data from the Lidarpod and post-process the location and orientation. This gives a more accurate location and orientation for every frame in the LiDAR data. The trajectory data in a LiDAR scan defines the locations of the laser scanner in 3-dimensional space. Increasing the accuracy of the trajectory data (commonly called track data) directly increases the accuracy of each lidar point.


After the navigation data processing, the LiDAR raw scan data was merged with the post-processed trajectory data using the LidarViewer software. This step generated the georeferenced 3D point cloud of the scanned area. The resulting data was then moved into specialized GIS (geographic information system) software where the classification of points, down sampling of point density, and exportation of required file formats was done for the client.

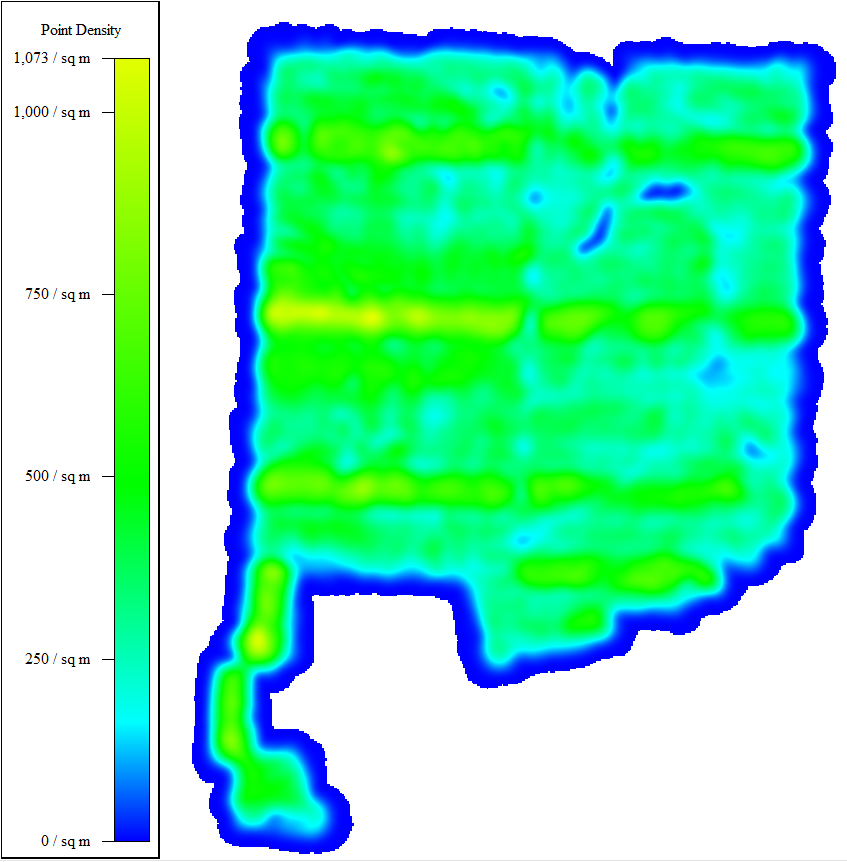
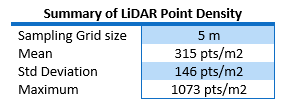
According to the configuration parameters applied to the LiDAR and the UAV for these flights, the theoretical point density was planned to be 303.1 pts/m² for a 50% overlap trajectory at 60 meters above the ground level.
The plot to the right shows that the LiDAR coverage density during the flight, blue being low density and yellow being high density. Globally the actual average density was 315 pts/m².

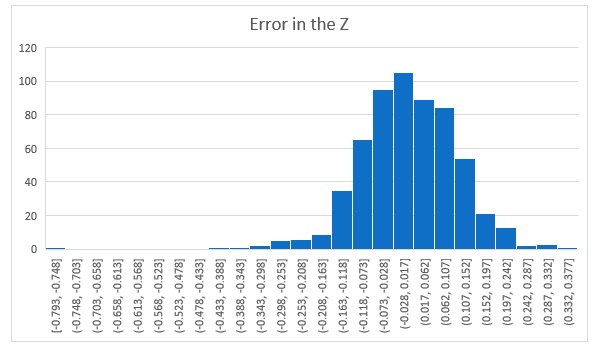
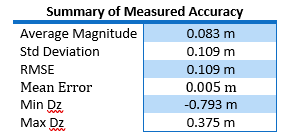
To calculate the accuracy of the LiDAR measurements, a third-party survey team recorded 592 ground control points which were compared to the LiDAR elevation data of Rekon Solutions Inc. The elevations measured by the LiDAR point cloud and the 592 measured terrestrial points were compared to find the delta. The error distribution is shown in the histogram and table shown in the images to the left.
The LiDAR scan results outlined in this document demonstrate how the M600 Pro and Routescene Lidarpod can be used together for surveys of large areas with both low- and high-density vegetation. After post-processing the LiDAR data, the accuracy (at 1 sigma) was less than 9 cm in the elevation data. With Rekon’s operational and post-processing procedures in place, the success of this 263-hectare land elevation survey definitly proves that a drone-based LiDAR platform is an accurate and cost-effective solution for that engineering and surveying company can deploy to gather data on land areas big and small. For more information about how we can help you on your next project, please contact us and we would be more than happy to answer questions or provide give free quotes.


Download the PDF version here.
Comments